Задача: получить импульсы с частотой 1КГц.
Исходный материал: PIC16f628a и простенькая devboard + proteus.
Модуль таймера TMR2 является 8 битным таймером с некоторыми особенностями. 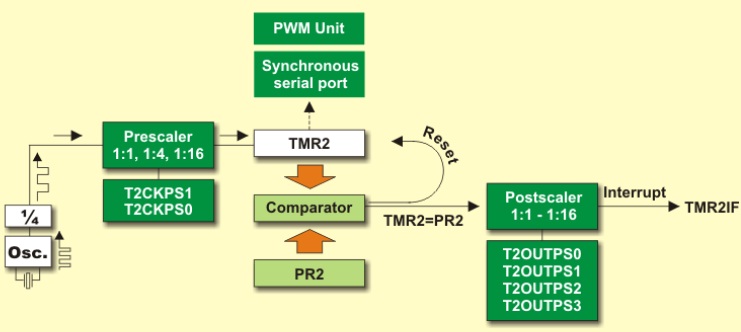
Импульсы с кварца проходят через предделитель с 3 коэффициентами деления (1, 4 и 16). Далее, поделенные импульсы используются для увеличения значения TMR2. Содержимое TMR2 сравнивается со значением, находящимся в регистре PR2. В случае совпадения импульсы поступают на очередной делитель и генерируется прерывание (TMR2IF).
Подсчет импульсов можно останавливать присваивая TMR2ON 0. Да, и еще, и TMR2 и PR2 являются перезаписываемыми.
Ниже приведены настройки первого делителя:
T2CKPS1 T2CKPS0
0 0 1:1
0 1 1:4
1 x 1:16
Соответственно, для второго делителя: 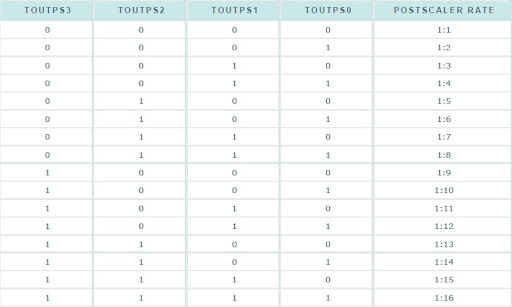
Ну и вдогонку, еще пару вещей, которые необходимо учитывать при разработке проекта на PIC микроконтроллере, использующем модуль таймера TMR2:
В момент подачи питания на микроконтроллера в регистре PR2 содержится значение FFh
Оба делителя сбрасываются при изменении значения TMR2
Сброс микроконтроллера ведет к сбросу предделителей
А сейчас попытаемся применить все сказанное на практике.
Не буду отклоняться от прошлых опытов и также применим таймер для генерации импульсов заданной частоты. У нас в распоряжении кварц 4 МГц, то есть на вход таймера поступает частота 1 МГц.
получим импульсы длиной в 500 us (частота 1KHz) #include <htc.h>
#define _XTAL_FREQ 4000000
#define out RB7
__CONFIG(WDTDIS & UNPROTECT & MCLREN & LVPDIS);
void main() {
__delay_ms(100); //небольшая задержка
TRISB = 0x00;
PORTB = 0x00;
TMR2 = 0x01; //стартуем с 1
PR2 = 0x64; //считаем по 100 мкс
T2CKPS0 = 0; T2CKPS1 = 0; //1 делитель не делит входную частоту
TOUTPS2 = 1; TOUTPS1 = 0; TOUTPS3 = 0; TOUTPS0 = 0; //2 делитель делит на 5
GIE = 1; // глобальные прерывания
PEIE = 1; // прерывания перефирии
TMR2IE = 1;
TMR2ON = 1; // Запуск таймера!
for (;;) {
//бесконечный цикл
}
}
interrupt isr() {
if (TMR2IF) {
out = !out;
TMR2 = 0x01;
T2CKPS0 = 0; T2CKPS1 = 0; //1 делитель не делит входную частоту
TOUTPS2 = 1; TOUTPS1 = 0; TOUTPS3 = 0; TOUTPS0 = 0; //2 делитель делит на 5
TMR2IF = 0; //сброс флага
}
}
Результат на осциллограме в протеусе: 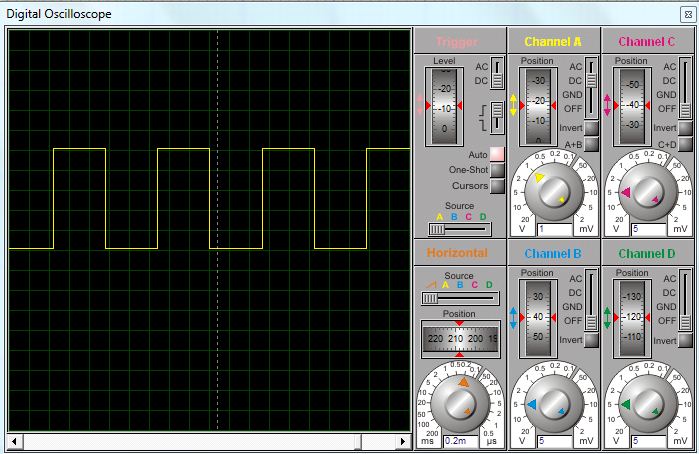
Источник: http://diymicro.ru/?p=84 | 

